机构是机械装备的核心问题。空间过约束机构是一种特殊的机构,它们不满足机构运动的Kutzbach准则,但由于机构铰链与杆件之间存在特殊的几何关系,使其仍具有完整周期的自由度。同时,过约束机构以其刚性好、结构简单、可靠性高等优点,在航天结构方面有着广泛的应用。
1 新的空间过约束机构
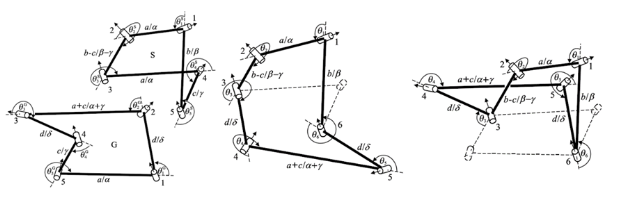
通过对空间机构的约束与协调特征进行研究,提出了过渡杆件和过渡机构两种新的过约束机构构建方法,发明了三类新的过约束机构: Back-to-back double Goldberg linkages、Extended Myard linkage和Mixed double-Goldberg linkages,丰富了空间机构的组成。其中,Mixed double-Goldberg linkages是一类单自由度过约束6R机构,由一个subtractive Goldberg 5R linkage 和一个 Goldberg 5R linkage通过过渡杆件和过渡机构的方法获得。
Mixed double-Goldberg linkages
2 空间过约束机构的运动学分析
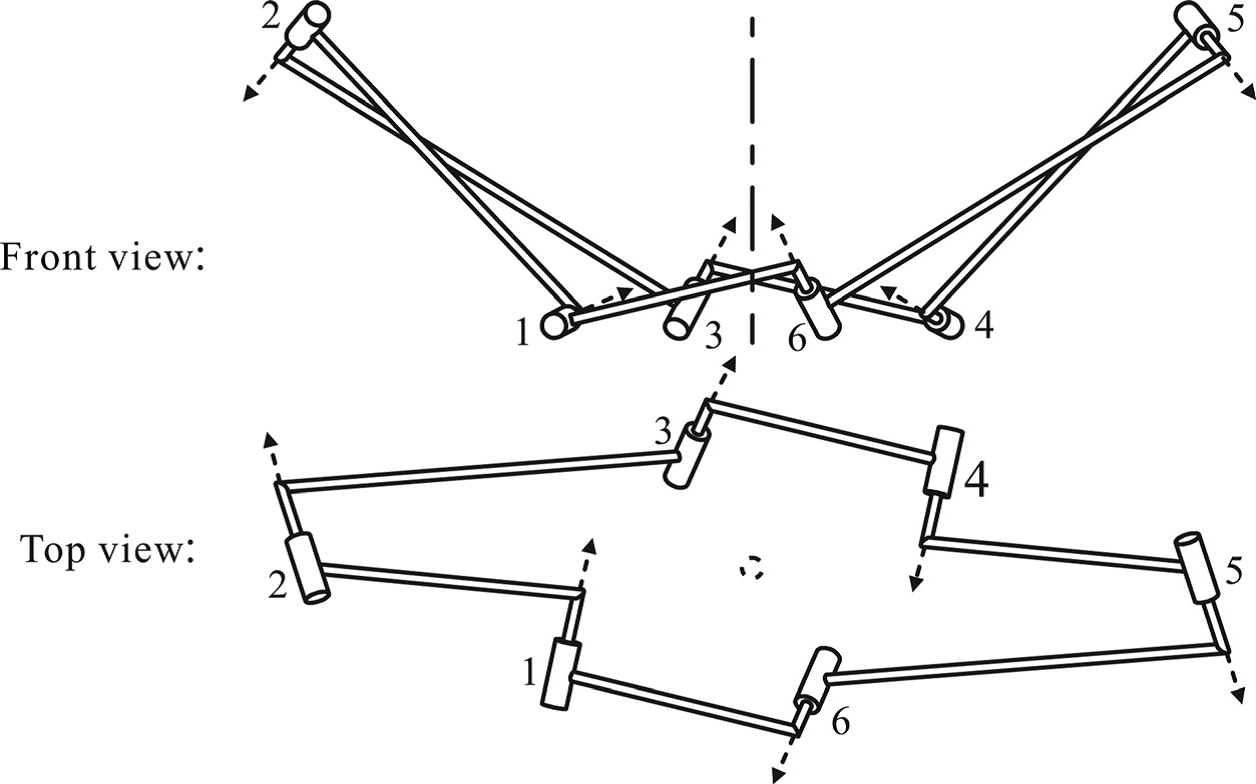
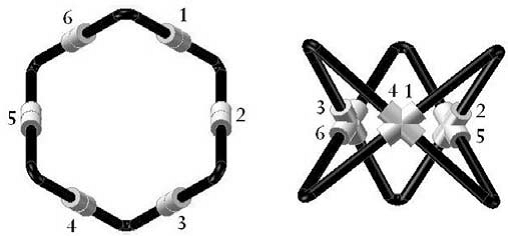
在对三重对称Bricard 机构运动学分析的基础上,对其变异形态进行了系统而完整的研究,获得了三重对称Bricard 机构的变异形态同时存在完全折叠的收拢状态和完全展开的六边形状态的机构参数和运动学模型。选用正三角形截面的杆件实现了机构的双稳态,并获得了此三角形截面杆件的设计参数与Bricard原始机构几何参数及运动参数间的对应关系。系统地分析了该机构的运动学特性,包括分叉行为,物理干涉,最终获得了实现机构完全展开和折叠状态之间连续平稳运动的设计通解。
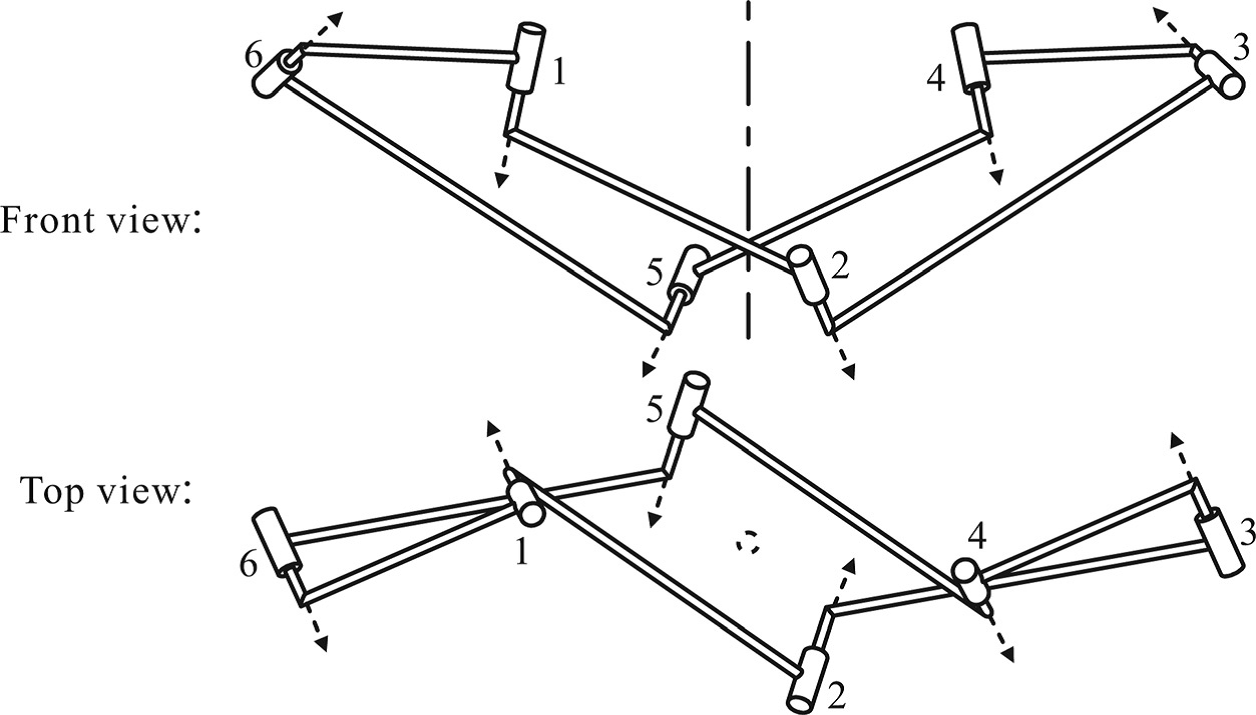
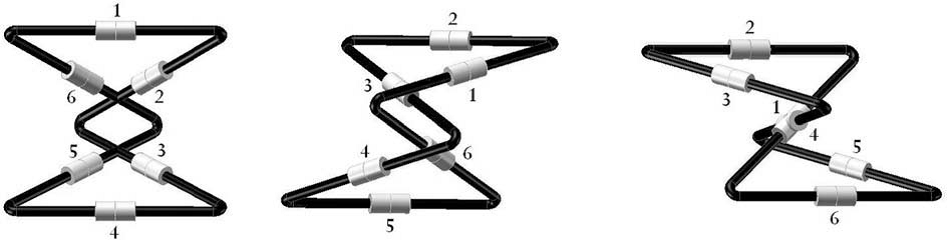
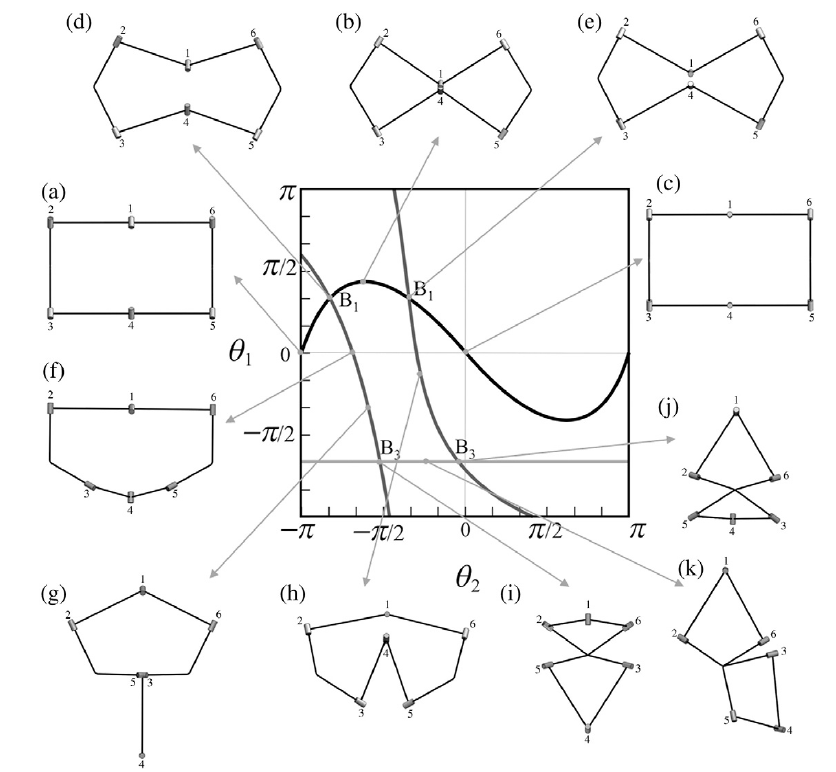
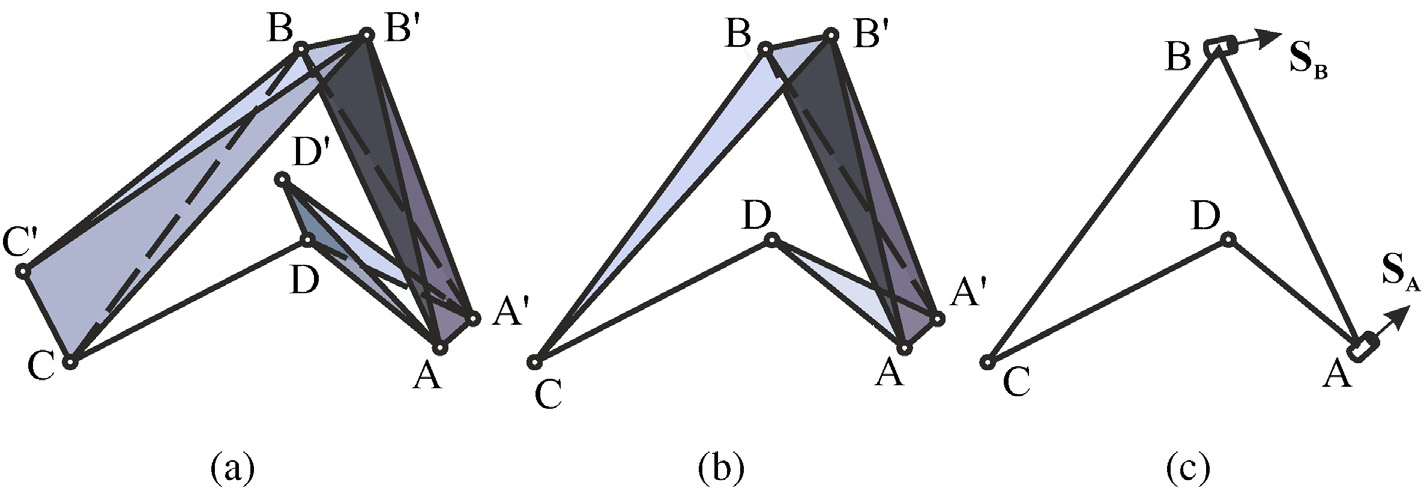
详尽分析了线对称Bricard机构的运动学,用矩阵方法建立了其运动学模型,并导出了其闭环方程两组独立的显式解,分别对应两种不同的机构闭合态,且它们之间无法相互转化。发现线对称Bricard八面体机构实际上是一般线对称Bricard机构的一个特例,找到了一种同时具有机构态和结构态的多闭合态线对称Bricard八面体机构(六个扭角和偏距均相等),并分析了不同参数条件下的闭合态特征。
存在完全折叠和展开状态的三重对称Bricard机构
一般线对称Bricard机构的两种闭合态
线对称Bricard八面体机构的机构态与结构态
3 空间过约束机构的分叉
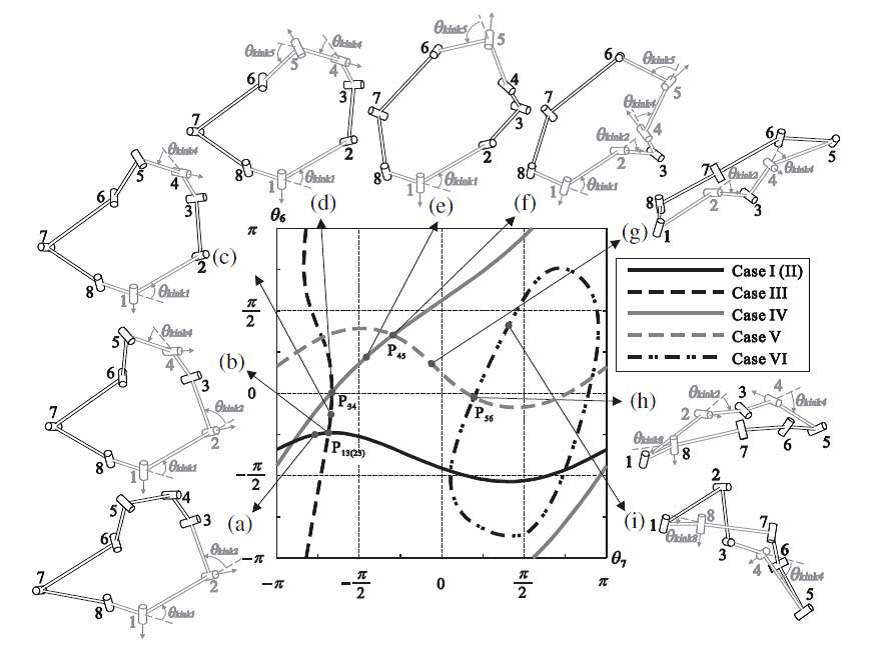
通过矩阵方法全面分析了线对称和面对称Bricard机构的分叉行为,采用奇异值分解理论分析了空间过约束机构的奇异性,同时用雅克比矩阵奇异值的秩来度量空间过约束机构的分叉点,发现了线面对称Bricard机构具有多条不同的运动途径和多个分叉点,进而构成了一个分叉闭合环路。进一步对这类复杂分叉行为进行系统的解析分析,得到了相应的机构组成的几何条件,为可重构机构的构建提供了有效的理论依据。
线面对称Bricard机构的分叉闭合回路
4 空间过约束机构的重构
提出了两种实现空间过约束机构间重构的方法,即通过分叉行为来实现空间过约束机构的重构和设计新的可重构机构。后者的典型例子是一种由4个Bennett机构网格衍生的可重构机构,通过活动铰链的变化选取获得了5种基于Bennett机构的空间过约束机构,实现了不同过约束机构间的重构,并分析了其工作空间,揭示了各种基于 Bennett 机构的空间过约束机构之间的联系与共性。
由Bennett机构网格衍生出的可重构机构
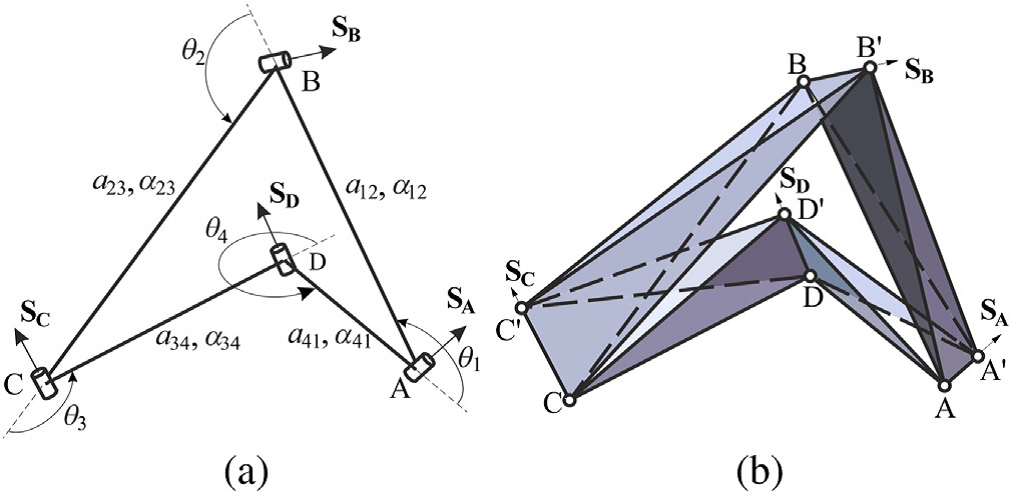
5 桁架理论在空间过约束机构分析中的应用
将机构学与结构力学有机融合,用结构力学理论研究机构的运动学特性(自由度、运动轨迹和分叉行为),实现了桁架结构与空间机构的等效转换,为分析具有复杂拓扑结构的机构的运动学特性提供了一条新的途径。并建立了基于桁架变换获得过约束机构的非过约束形式的方法,成功解决了机构精度与运动协调的矛盾,拓展了这类机构的应用潜力。
Bennett机构的非过约束形式